

I sikkerhetsscenarier blir overvåkningsutstyr ofte utsatt for vind - induserte svingninger på grunn av lang - avstandsinstallasjon. Mens kameraet er bred - Vinkelmodus demonstrerer minimal følsomhet for ytre forstyrrelser, Teleoto -modus Optisk forsterker mekaniske vibrasjoner, noe som fører til betydelig uskarphet eller til og med tap av målfokus. Følgelig, Aktive stabiliseringsmekanismer har vist seg som et kritisk teknisk krav for lange - Range overvåkningssystemer. Nåværende stabiliseringsteknologier faller først og fremst i to kategorier: Optisk bildestabilisering (OIS) og Elektronisk bildestabilisering (EIS).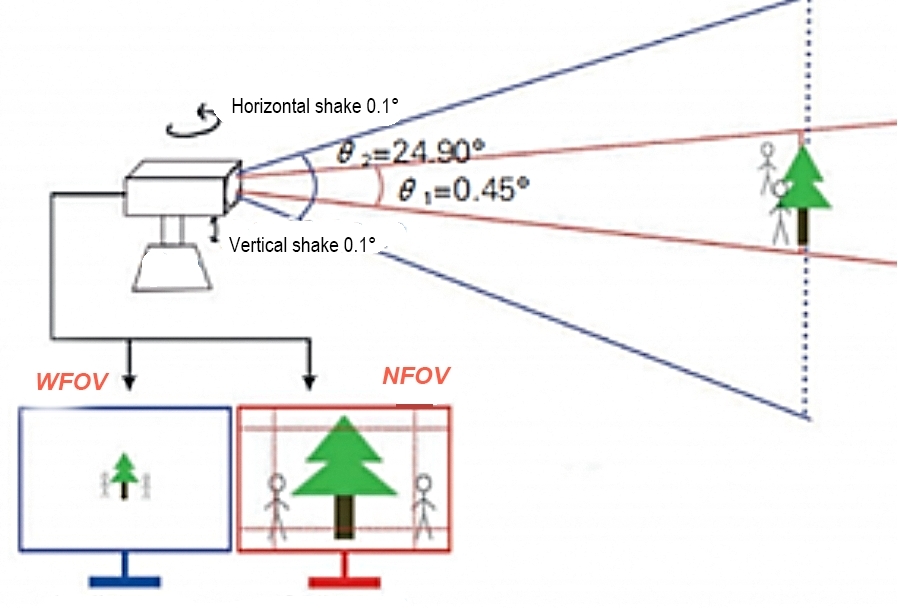
EIS bruker en bildepost - Behandler algoritme for å oppnå bildestabilisering. Det krever at det nåværende skuddet blir forstørret, noe som resulterer i et tap på 10% av 20% av overvåkningsfeltet. I EIS -teknologi er linsen bare ansvarlig for anskaffelse av bilde. Etter at sensoren danner et bilde, må det først bli bildestabilisert ved hjelp av den bygde - i Image Processor Core -algoritmen, og deretter blir videoen komprimert og overført. Denne typen bildestabilisering oppnås fullstendig gjennom digital prosesseringsteknologi, noe som reduserer videokvaliteten og har en generell stabiliseringseffekt. Det brukes vanligvis i lave - Sluttprodukter på grunn av kostnadsfordelen.

OIS bruker et bygget - i gyroskop i linsesamlingen for å oppdage kamera vibrasjoner. Gyroskopet konverterer mekaniske bevegelsesdata til elektriske signaler overført til OIS -kontrolleren. Kontrollerens sentrale prosesseringsenhet analyserer umiddelbart og beregner forskyvningen eller vinkelen som objektivet trenger å kompensere for, og bruker den elektromagnetiske kraften generert av tre sett med spoler og magneter gjennom drivmotoren for å kjøre nøyaktig linsen til vipp, korrigere den optiske banen, og unngå å bli uskadd forårsaket av shake. Ved optisk design, ved å legge til en bevegelig objektiv, kontrolleres linseskiftet basert på mengden risting, og kompenserer den optiske banen tilbake til en stabil tilstand.
Innenfor hver eksponeringssyklus må OIS sekvensielt utføre: vibrasjonsdeteksjon, signalbehandling og kompenserende objektivaktivering. Hele prosessen er servobevegelse, som også har egenskapene til kort deteksjonstid, rask signalbehandlingshastighet, liten linse kompensasjonsbevegelse, og vedtar en enkel og relativt stabil PID -kontrollalgoritme.
